
自制操作系统(11):进程创建、调度与切换(上)
在上几章,我们成功地在我们的操作系统实现了内存管理模块,我们可以申请任意的堆空间了。那么接下来,我们进行勇敢的迈进——来看看怎么实现多进程。
多进程的本质
要聊多进程就得先聊聊进程,通俗地讲,进程就是运行中的程序,程序在我们的硬盘上,只是一个简单的文件,我们按它的规则把它读到内存里面,再把我们”下一条要执行的指令“指向这个程序的入口点,下面就能让这个程序的指令协同其数据在CPU上运行,这才是一个进程。我们现在的内核进程就是这样的。
多进程的本质是时分复用。一个CPU同时只能执行一条指令,但是通过在不同进程之前的快速切换,看起来就会像是同时在运行多个进程,而且每个进程都感觉自己在独占CPU、内存等资源。现在我们还处在内核态,所以我们在这一章会先实现内核进程的创建和调度,而不是隔离,隔离是我们在未来会在实现用户态进程创建的时候再去实现的事情,因为内核的代码由我们编写,应该是通过编码本身去保证内核代码的可靠性、安全性,而不是隔离。但是,我们可以稍微谈谈未来的“隔离”:
上面说到这种独占的体验,依赖的是我们对硬件资源的虚拟化(Virtualization),想想,我们之前花了那么大的功夫去做内核高半区、虚拟内存、分页…为什么不直接用物理内存呢?除了所谓的碎片管理外,还有很重要的原因,我们通过切换不同的页目录(更换CR3),因为有了虚拟地址的屏蔽,每个进程都像是独占所有的内存。很神奇吧?虚拟化是手段,让每个进程感觉自己都在独占所有的硬件资源,不会在执行的时候互相干扰(也就是”隔离“)才是目的。
怎么能让他们不互相干扰呢?拿我们现在的内核进程说,现在我们从头到尾都只有这一个进程,所以我们的进程确实在独占所有的硬件资源,那么,假设我们现在多出来了一个进程,为了让它们不相互影响。我们就得把现有的硬件资源暂时转移给这个新的进程使用,转移的过程就涉及怎么把这些资源上旧的数据保存起来,以及在转移的时候恢复回来的一些逻辑的实现。这些所有的需要保存和恢复的”旧的数据“,被称为“进程上下文”,包括寄存器和内存,而内存因为我们已经做过虚拟化了,可以通过切CR3一键切换虚拟内存,所以总的来说,我们需要保存的是寄存器里面的数据。
接口
我们先来看看进程创建与调度相关的基本接口:
uint32_t create_process(void* entry);
uint32_t exit_process(uint32_t pid);
以及记录进程上下文的结构PCB(Process control block,进程控制块):
struct PCB {
uint32_t pid;
// 通用寄存器
uint32_t eax;
uint32_t ebx;
uint32_t ecx;
uint32_t edx;
uint32_t esi;
uint32_t edi;
// 栈与执行位置
uint32_t esp;
uint32_t ebp;
uint32_t eip;
// 标志寄存器
uint32_t eflags;
// 该任务的内核栈底(用于释放内存)
uint32_t kernel_stack_bottom;
};
我们把各种PCB的指针通过一个数组组织起来统一管理:
static PCB* process_list[MAX_PROCESSES_NUM];
static uint8_t cur_process_idx;
为了方便说明,我们再新建一个进程调度相关的文件:schedule.h,定义一个函数yield(),来表示这个进程愿意主动让出硬件资源(切换到别的进程,给别的进程用)。
void yield();
进程逻辑初始化
对于我们现在已有的唯一的内核主进程,后面实现创建进程逻辑后,这些稍后被创建的进程在退出后,得返回到我们一开始的内核主进程,这就要求我们还得把一开始的主进程包装成一个进程,我们不妨把这个进程作为0号进程。
.global stack_bottom
extern uintptr_t stack_bottom;
void process_init() {
process_list[0] = reinterpret_cast<PCB*>(kmalloc(sizeof(PCB)));
process_list[0]->kernel_stack_bottom = reinterpret_cast<void*>(stack_bottom);
process_list[0]->pid = 0;
cur_process_id = 0;
}
uint32_t exit_process(uint32_t pid) {
if (pid == 0) return 1;
}
我感觉应该把从0号进程退出视为一种异常并返回,不然后面kfree掉一开始在.bss区的内核栈就麻烦了。
创建进程
为了创建进程,理论上来说,我们需要一个代表进程入口点的函数的地址以供跳转,一个初始化好的虚拟内存空间以供进程在上面使用,还有初始化的寄存器状态供初始化进程的状态。但是对于内核进程,我们不需要初始化内存空间,这是因为一般来说我们的程序文件是会有很多段的,比如.bss是需要初始化为0的静态数据段,.data是需要进行指定初始化的静态数据段,.rodata是只读的不可修改的一些数据段,.text是需要执行的代码指令段,对于内核进程,我们一直用的是同一个虚拟内存,上面说的种种段早在引导阶段就被加载进程内存了,因此只需要提供入口点即可创建一个内核进程,后面切换到对应的入口点,就相当于切换内核进程,十分简单。
uint32_t create_process(void* entry) {
for (auto nid = 0; nid < MAX_PROCESSES_NUM; ++nid) {
if (process_list[nid] == nullptr) {
PCB*& new_process = process_list[nid];
new_process = reinterpret_cast<PCB*>(kmalloc(sizeof(PCB)));
memset(new_process, 0, sizeof(PCB));
new_process->kernel_stack_bottom = kmalloc(4096);
new_process->esp = (uintptr_t)(new_process->kernel_stack_bottom);
new_process->ebp = (uintptr_t)(new_process->kernel_stack_bottom);
new_process->eip = (uintptr_t)(entry);
new_process->pid = nid;
process_switch_to(nid);
return nid;
}
}
return 0;
}
在create_process,我们简单设置一下PCB对应的字段即可:找到process_list中的空位,分配一块内存存放PCB并置零,再分配一块内存作为它的内核栈、设置栈指针、把EIP设置为函数的入口点地址,设置pid,并返回该pid。
注意这里的process_switch_to,我们在创建进程后,应该要把当前运行的进程给切换到这个进程,我们留待后面讲上下文切换的时候再实现。
退出进程
退出进程实际上是销毁进程,把分配的PCB内存、内核栈内存回收,置空对应pcb列表项即可。
uint32_t exit_process(uint8_t pid) {
if (pid == 0 || process_list[pid] == nullptr) return 1;
PCB*& cur_process = process_list[pid];
kfree(reinterpret_cast<void*>(cur_process->kernel_stack_bottom));
kfree(reinterpret_cast<void*>(cur_process));
cur_process = nullptr;
yield();
// 不应该执行到这里
return 0;
}
上下文切换
创建了进程,process_list也保存了相关的进程信息,那么我们该怎么去让我们的进程去“依次执行”呢?
美好的世界
想象一个谦让的世界,这里的每个进程都愿意在执行一定程度的工作后,主动调用yield函数让出CPU,那么流程将会是进程1执行一段时间后主动让出——调度器选择另外一个进程2继续执行——另外一个进程执行一段时间后主动让出——…直到所有的进程执行完成任务。
那么也许,我们可以这样来实现yield函数:
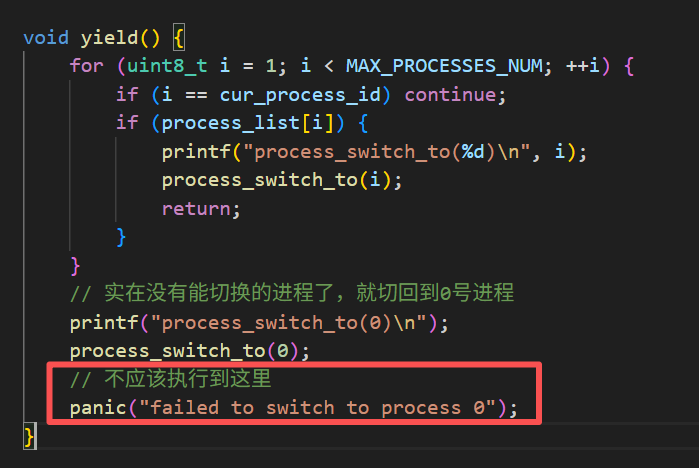
void yield() {
for (uint8_t i = 1; i < MAX_PROCESSES_NUM; ++i) {
if (i == cur_process_id) continue;
if (process_list[i]) {
process_switch_to(i);
}
}
// 实在没有能切换的进程了,就切回到0号进程
process_switch_to(0);
// 不应该执行到这里
panic("failed to switch to process 0");
}
这样朴素的实现或许就挺好,然后我们再来实现process_switch_to函数。
process_switch_to
process_switch_to值得特别一提。如果谈到process_switch_to本身应该做什么,应该是不难说明的,把当前的寄存器状态保存到当前进程的PCB,然后读入对应PCB的寄存器状态即可;可在实际的实现上,我们会遇到无法直接用mov EIP, ...这样的指令的问题,我们有两条路线,一条是往我们的内核栈里面push进入口地址,然后执行ret指令,那么这就会让我们“返回”到函数的入口地址,另一条是jmp到入口地址。对比来看,无非是简洁与直观的区别。我们这里选择把寄存器保存到本栈的方案,这样,我们还能获得新的便利:在PCB中保存ESP寄存器即可。
既然要通过执行假ret来改变EIP,那我们就得看看ret实际上是在执行什么:
pop eip ; 把 esp 指向的值弹到 eip,然后 esp += 4
也就是说,我们可以通过汇编指令,去把esp赋值为对应PCB块的esp,再调用pop去恢复寄存器,最后调用一个ret跳到对应的入口函数(或者说,该进程上次yield的地方),这要求我们在create_process阶段就把新进程的内核栈帧给准备好,于是,我们需要更新PCB和create_process:
typedef struct PCB {
uint8_t pid;
uintptr_t esp;
// 该任务的内核栈底(用于释放内存)
void* kernel_stack_bottom;
} PCB;
uint32_t create_process(void* entry) {
for (auto nid = 0; nid < MAX_PROCESSES_NUM; ++nid) {
if (process_list[nid] == nullptr) {
PCB*& new_process = process_list[nid];
new_process = reinterpret_cast<PCB*>(kmalloc(sizeof(PCB)));
memset(new_process, 0, sizeof(PCB));
new_process->kernel_stack_bottom = kmalloc(4096);
new_process->esp = (uintptr_t)(new_process->kernel_stack_bottom) + 4096;
*((uintptr_t*)((new_process->esp - 4))) = reinterpret_cast<uintptr_t>(&exit_process_wrapper);
*((uintptr_t*)(new_process->esp - 8)) = reinterpret_cast<uintptr_t>(entry);
*((uintptr_t*)(new_process->esp - 12)) = 0; // ebx
*((uintptr_t*)(new_process->esp - 16)) = 0; // esi
*((uintptr_t*)(new_process->esp - 20)) = 0; // edi
*((uintptr_t*)(new_process->esp - 24)) = 0; // ebp
new_process->esp -= 24;
new_process->pid = nid;
process_switch_to(nid);
return nid;
}
}
return 0;
}
注意我还多压了一个exit_process_wrapper函数来退出当前进程,不然我们的程序ret之后,要么不知道跑哪去然后崩溃,要么就直接崩溃了,这个函数的实现如下:
void exit_process_wrapper() {
exit_process(cur_process_id);
}
由此,我们可以来通过汇编来实现process_switch_to:
.extern process_list
.extern cur_process_id
.global process_switch_to
process_switch_to:
pushl %ebx
pushl %esi
pushl %edi
pushl %ebp
#保存...
movzbl cur_process_id, %eax
movl process_list(, %eax, 4), %eax
movl %esp, 4(%eax)
#更新cur_process_id和esp寄存器...
movzbl 20(%esp), %eax
movl process_list(, %eax, 4), %eax
movl (%eax), %ebx
movb %bl, cur_process_id
movl 4(%eax), %esp
popl %ebp
popl %edi
popl %esi
popl %ebx
ret
(上面短短的汇编写了我好久…)
事不宜迟,我们来创建两个函数,代表两个独立的进程:
void proc1() {
for (uint32_t i = 0; i < 99; i++) {
printf("proc1:%d/99\n", i);
yield();
}
}
void proc2() {
for (uint32_t i = 0; i < 99; i++) {
printf("proc2:%d/99\n", i);
yield();
}
}
...kernel_main
process_init();
asm volatile ("sti");
printf("OK\n");
printf("Welcome, aoverb!\n\n");
printf("The kernel_main lies in %X, sounds great!\n\n", &kernel_main);
char input[256];
create_process(reinterpret_cast<void*>(&proc1));
create_process(reinterpret_cast<void*>(&proc2));
...
哎呀。。。有问题。。。
后面发现,不能这么写。。。
可以了!现在,我们可以看到我们的1号进程和2号进程并驾齐驱,交替执行!我们终于迈出了多进程可喜的第一步!
现实的世界
现在让我们稍微冷静,回到现实的世界——进程之间可不会互相谦让,比如说,大家都不肯yield出CPU资源,或者说更复杂的情况,进程没法yield出CPU,这要怎么办呢?我们现在的调度算法是约等于没有的,需要一个更好的调度算法,这个就留在下篇展开讲解了。
参与讨论
(Participate in the discussion)
参与讨论
没有发现评论
暂无评论