
自制操作系统(26):TCP(三)——接发数据
今天我们来实现TCP接发数据。
用户态
pollfd fds[2] = {
{ .fd = 0, .events = POLLIN, .revents = 0}, // 标准输入
{ .fd = conn, .events = POLLIN, .revents = 0 }
};
char buff[256];
while(1) {
int ret = poll(fds, 2, -1); // -1 = 无限等待
if (ret < 0) { break; }
if (fds[0].revents & POLLIN) {
uint32_t n = read(0, buff, sizeof(buff));
if (n <= 0) break;
write(conn, buff, n);
}
// socket 有数据 → 读取并打印
if (fds[1].revents & POLLIN) {
uint32_t n = read(conn, buff, sizeof(buff));
if (n <= 0) {
printf("connection has been closed\n");
break;
}
buff[n] = '\0';
printf("%s\n", buff);
}
这是我们剩下的要实现的代码,我们可以看到一个很关键的概念:poll。
poll
poll的概念很简单,就是我们给它一些文件描述符,我们调用它开始阻塞,直到有文件描述符生成了相应的事件,或者超时,它就让我们跑通下面的流程。而我们还没有实现poll,下面需要给出它的实现。
我们首先可以想到一种简单的做法:把所有的文件描述符的read都调用一遍。但是,这样做效率不高,而且有的读是阻塞的。
我们可以想象,poll会把当前进程丢进这几个文件描述符的等待序列,而文件描述符的驱动(或者相关的别的什么东西)会负责去唤醒等待序列中的进程。我们或许可以再实现一个文件操作相关的函数,这个函数可以把进程注册进文件驱动的等待序列中,让文件驱动去唤醒这个进程。
但是我们现在的进程只支持把自己放在一个等待序列,要放在多个序列,需要再做一层封装,并在要移出等待队列的时候,加锁,判断状态是否还是waiting。而且这还不够,我们最好是能把自己从所有的等待序列里面移出来。
也许可以换一种思路,我们不把自己挂在任何文件驱动的等待序列,而是调用文件驱动的回调函数去确认有没有数据。
int sys_poll(interrupt_frame* reg) {
pollfd* fds = reinterpret_cast<pollfd*>(reg->ebx);
uint32_t fd_num = reg->ecx;
uint32_t timeout = reg->edx;
process_queue poll_queue;
bool has_event = false;
bool has_data = false;
{
SpinlockGuard guard(process_list_lock);
PCB* cur_pcb = current_pcb();
insert_into_process_queue(poll_queue, cur_pcb);
for (int i = 0; i < fd_num; ++i) {
if (cur_pcb->fd[fds[i].fd] == nullptr) {
if (fds[i].events & INVFD) {
fds[i].revents |= INVFD;
has_event = true;
}
} else {
int ret = v_peek(cur_pcb, fds[i].fd);
if (ret < 0 && (fds[i].events & ERROR)) {
fds[i].revents |= ERROR;
has_event = true;
} else if (ret == 0 && (fds[i].events & POLLIN)) {
fds[i].revents |= POLLIN;
has_event = true;
has_data = true;
}
v_setpoll(cur_pcb, fds[i].fd, &poll_queue);
}
}
if (!has_event) {
current_pcb()->state = process_state::WAITING;
}
}
if (!has_event) {
::timeout(&poll_queue, timeout);
} else {
SpinlockGuard guard(process_list_lock);
remove_from_process_queue(poll_queue, current_pcb()->pid);
return 1;
}
{
SpinlockGuard guard(process_list_lock);
PCB* cur_pcb = current_pcb();
for (int i = 0; i < fd_num; ++i) {
if (cur_pcb->fd[fds[i].fd] == nullptr) {
if (fds[i].events & INVFD) {
fds[i].revents |= INVFD;
}
} else {
int ret = v_peek(cur_pcb, fds[i].fd);
if (ret < 0 && (fds[i].events & ERROR)) {
fds[i].revents |= ERROR;
} else if (ret == 0 && (fds[i].events & POLLIN)) {
fds[i].revents |= POLLIN;
has_data = true;
}
v_setpoll(cur_pcb, fds[i].fd, nullptr);
}
}
}
return has_data;
}
最终采取了这种不能多进程打开fd的方案:我们把自己挂入本地的等待队列,并把当前队列的队头指针传给fd的poll_queue,当有数据时由fd负责从把我们从队列中叫醒,因为大家在移除队列时都会用process_list_lock,所以是不担心被唤醒多次的。醒来之后我们每个文件都peek一下,并记录事件,最后把大家的poll_queue清空。
如果后面需要做多进程打开fd的方案,那就要把poll_queue做成一个链表,我们自己构造链表项,并去持一把公共的,放在fd的poll_queue_lock插入poll_queue,清理时也是一样的,持锁清理即可。
read
我们到现在都还没适配tcp读的逻辑——因为我们的window里面都还没有东西呢!不过我们可以先把这部分逻辑补上:
int tcp_read(socket& sock, char* buffer, uint32_t size) {
// head 与 tail,左闭右开
TCB* tcb = sock.data.tcp.block;
SpinlockGuard guard(tcb->lock);
char* window = sock.data.tcp.block->window;
size_t read_size;
if (tcb->window_used_size == 0) {
return 0;
}
if (tcb->window_head < tcb->window_tail) {
read_size = tcb->window_tail - tcb->window_head < size?
tcb->window_tail - tcb->window_head : size;
memcpy(buffer, window + tcb->window_head, read_size);
} else {
size_t first = tcb->window_size - tcb->window_head;
if (size <= first) {
memcpy(buffer, window + tcb->window_head, size);
read_size = size;
} else {
memcpy(buffer, window + tcb->window_head, first);
size_t second = (size - first) > tcb->window_tail ? tcb->window_tail : size - first;
memcpy(buffer + first, window, second);
read_size = first + second;
}
}
tcb->window_head = (tcb->window_head + read_size) % tcb->window_size;
tcb->window_used_size -= read_size;
return read_size;
}
我们在TCB给window加了个window_used_size字段,这样可以让我们的循环缓冲区语义更明确。
case tcb_state::ESTABLISHED:
{
if ((header->flags & (uint8_t)tcp_flags::ACK) == 0) {
break;
}
if (ntohl(header->seq_num) != tcb->ack) { // 我们先做一个简单实现,乱序的直接丢弃
break;
}
size_t payload_size = size - ip_header_size - header->data_offset * 4; // 别忘了乘4
char* payload = buffer + header->data_offset * 4 + ip_header_size;
if (tcb->window_size - tcb->window_used_size < payload_size) {
break; // 超过当前窗口大小直接丢弃
}
if (tcb->window_tail < tcb->window_head) {
memcpy(tcb->window + tcb->window_tail, payload, payload_size);
} else {
size_t first = tcb->window_size - tcb->window_tail;
if (first >= payload_size) {
memcpy(tcb->window + tcb->window_tail, payload, payload_size);
} else {
memcpy(tcb->window + tcb->window_tail, payload, first);
size_t second = payload_size - first;
memcpy(tcb->window, payload + first, second);
}
}
tcb->window_used_size += payload_size;
tcb->window_tail = (tcb->window_tail + payload_size) % tcb->window_size;
tcb->ack += payload_size;
send_tcp_pack(tcb, (uint8_t)tcp_flags::ACK, nullptr, 0);
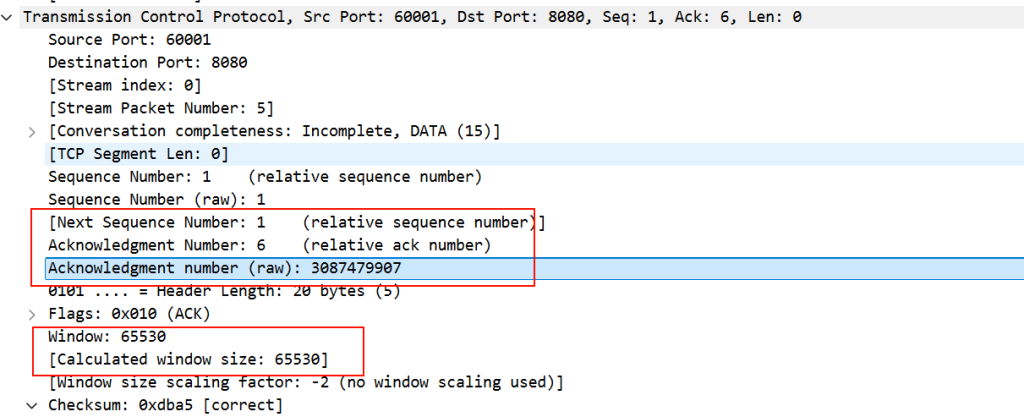
接收的逻辑。别忘了用payload_size更新ack,以及在send_tcp_pack里面告诉对端我们还剩的窗口大小:
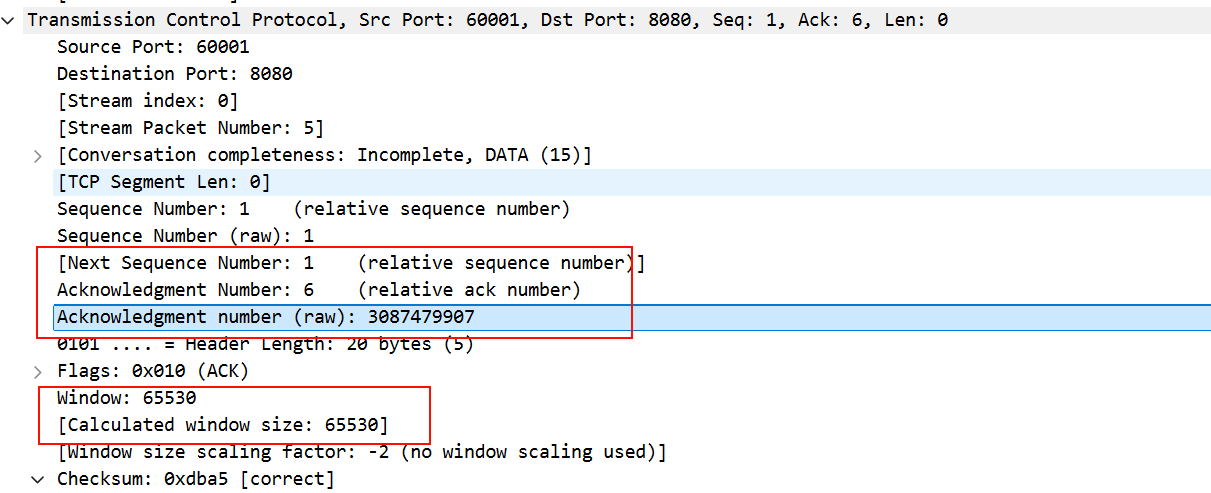
从wireshark抓包的逻辑看我们都正确更新了。但是有消息来时系统崩溃了,加这段;
} else {
SpinlockGuard guard(process_list_lock);
remove_from_process_queue(poll_queue, current_pcb()->pid);
for (int i = 0; i < fd_num; ++i) {
if (current_pcb()->fd[fds[i].fd] != nullptr) {
v_setpoll(current_pcb(), fds[i].fd, nullptr);
}
}
return 1;
}
之前是use-after-free了。把这个修复之后还没能收到数据,应该是peek的问题。
把peek修好之后,可以收到信息了,但是显示还是有问题..
首先,是收到数据后会无限换行(这个大概率是我对于read返回值判断不严格);
其次是会被控制台阻塞,导致我发送完信息才能看到服务器发过来的信息。
问了Claude,很有可能是我的控制台设备peek太宽松,要按换行符来判断。
改造设备文件
read的时候会把文字塞进console_buffer,直到buffer充满,或者换行,或者超过指定大小;在这之前,read函数不会向你提供的buffer写进任何东西。我们改造一下console_peek函数,让它把我们输入的字符吃进一个缓冲区,且提供一个line_ready标识给console_read函数直到我们敲下回车,都不会把这个值设置为true:
static int console_peek() {
while (keyboard_haschar() && !line_ready) {
char c = keyboard_getchar();
if (c == '\b') {
if (line_len > 0) {
--line_len;
terminal_write("\b", 1); // 回显退格
}
continue;
}
if (c == '\n') {
line_buf[line_len++] = '\n';
terminal_write("\n", 1); // 回显换行
line_ready = true;
break;
}
if (c >= 32 && c <= 126 && line_len < sizeof(line_buf) - 1) {
line_buf[line_len++] = c;
terminal_write(&c, 1); // 回显可见字符
}
}
return line_ready ? (int)line_len : 0;
}
static int console_read(char* buffer, uint32_t offset, uint32_t size) {
while (!line_ready) {
console_peek();
if (!line_ready)
asm volatile("pause");
}
uint32_t n = line_len < size ? line_len : size;
memcpy(buffer, line_buf, n);
// 重置缓冲区
line_len = 0;
line_ready = false;
return n;
}
这样我们在peek的时候,只要不敲下回车,我们就不会调用read;而调用read的时候因为行数据已经准备好了,就不会被阻塞。
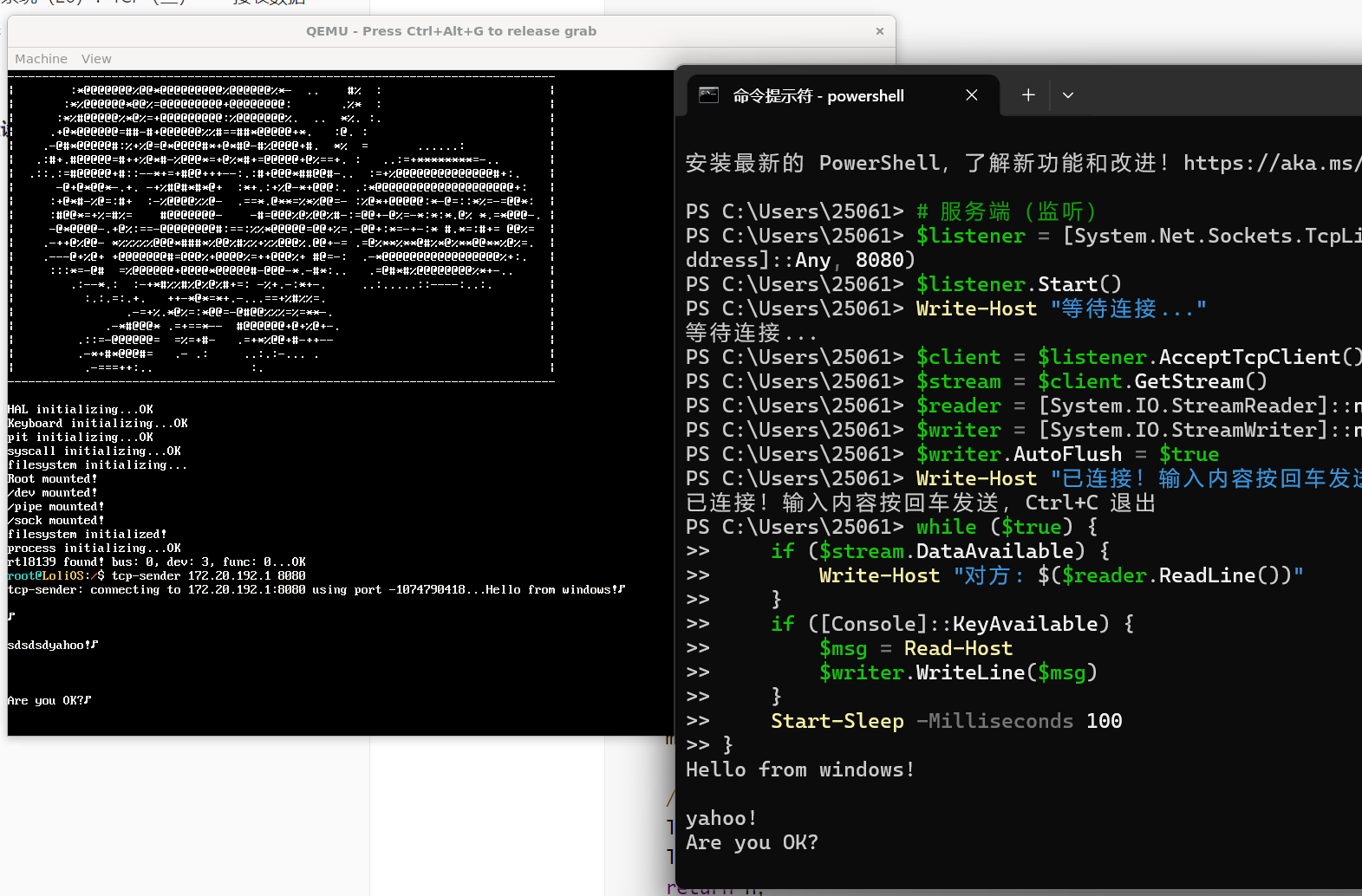
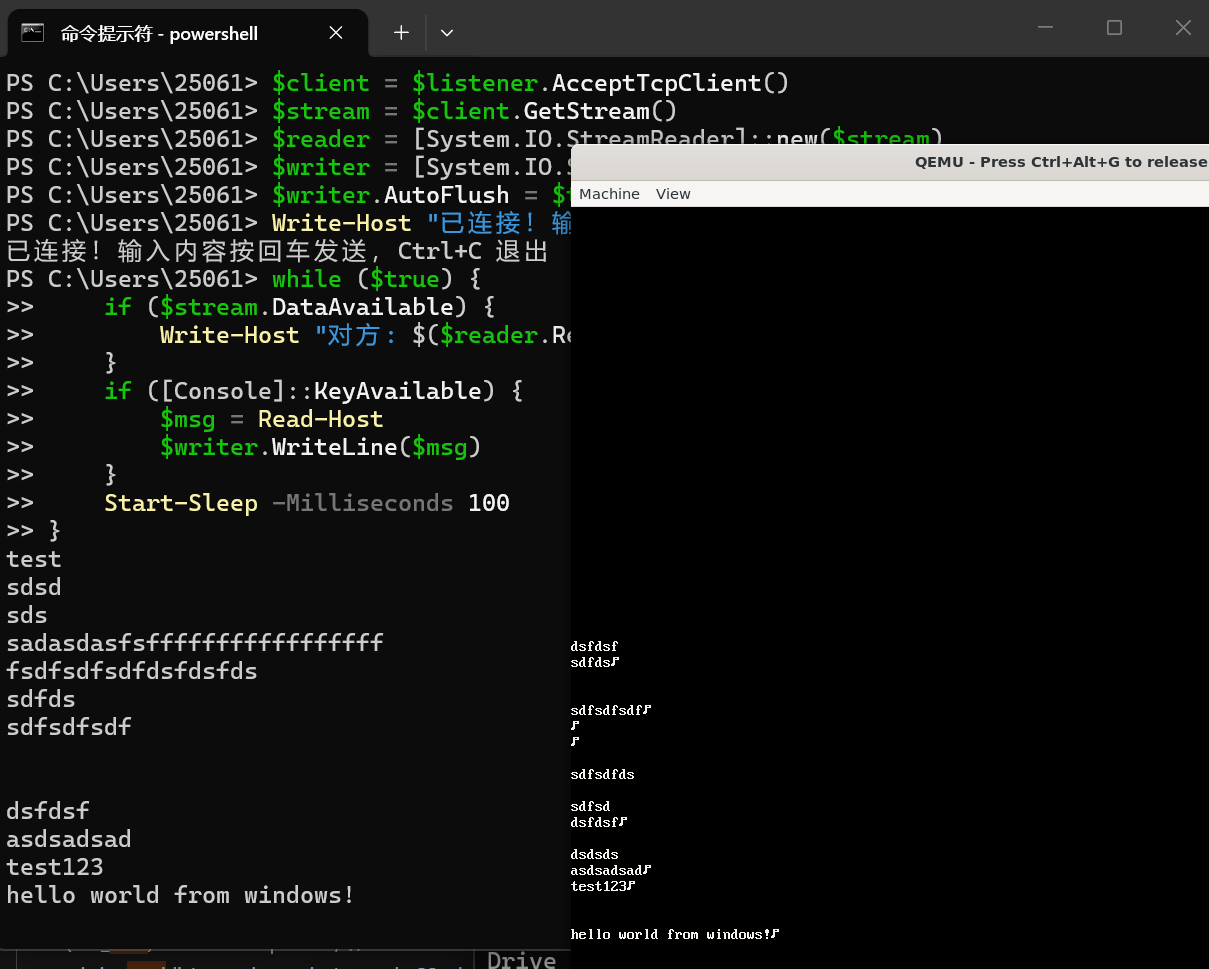
就这样,我们的TCP实现了接收数据!
发送数据
我们先不做重传,所以我们发出一条数据后,只能等ack发回来之后,再发送数据。甚至,我们可以完全不用等ACK。
非完美主义
完美主义是实干的大敌。事实是,我们只能通过尝试与迭代来做成一件事,而不是一上来就有各种“伟大的想法…”。所以对于发送数据,我不打算把事情干得很漂亮,能用,对我来说就足够了。
于是,这就是我的发送数据的实现代码:
int tcp_write(socket& sock, char* buffer, uint32_t size) {
TCB* tcb = sock.data.tcp.block;
int ret = send_tcp_pack(tcb, (uint8_t)tcp_flags::ACK, buffer, size);
return ret;
}
我们想要的东西其实就这么简单,不是吗?
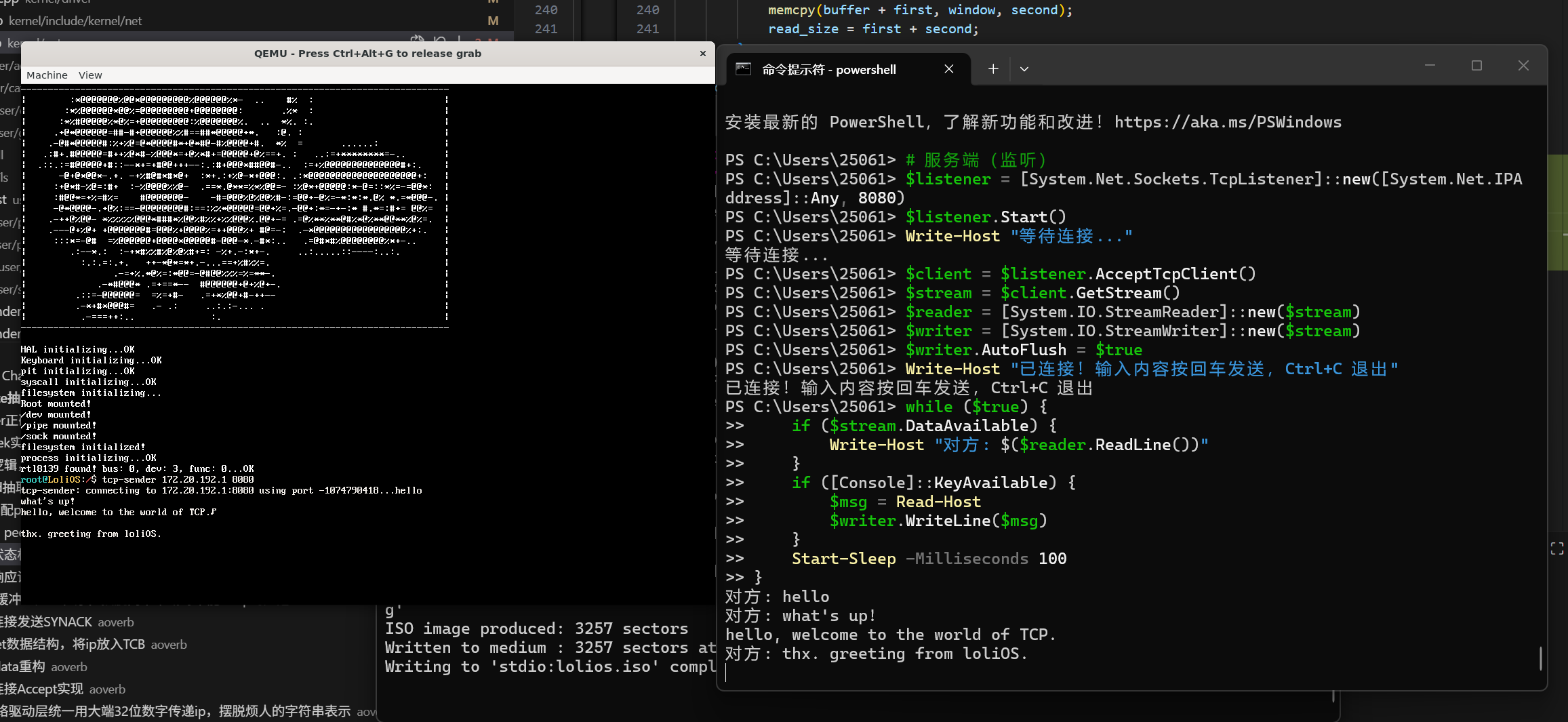
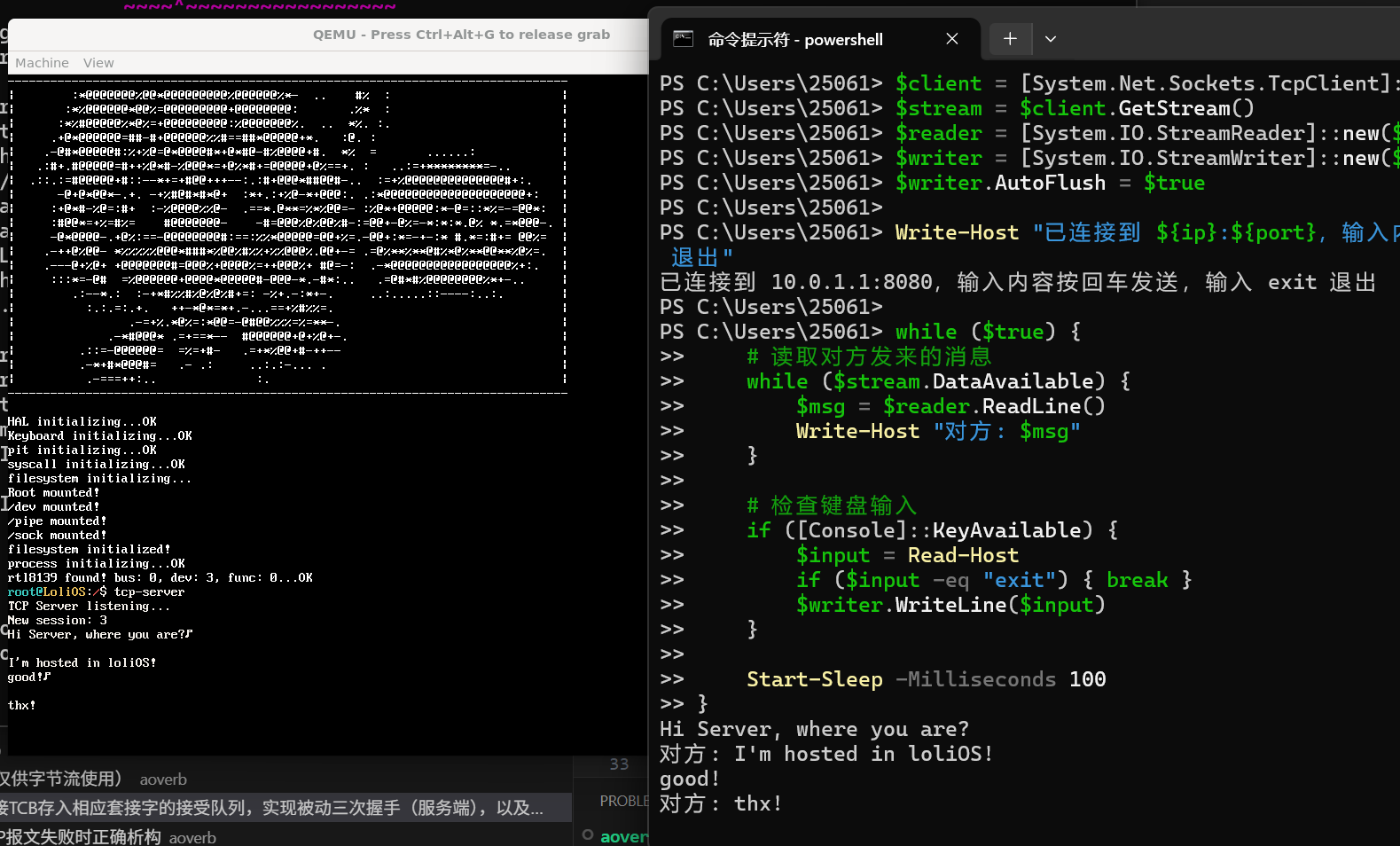
就这样,我们成功实现了TCP的客户端和服务端,并实现了简单的接发数据,而且把发送数据是简化得不能再简化。
poc: 一个简单的HTTP客户端
我们现在还没有DNS,所以只能靠自己手动输入IP。
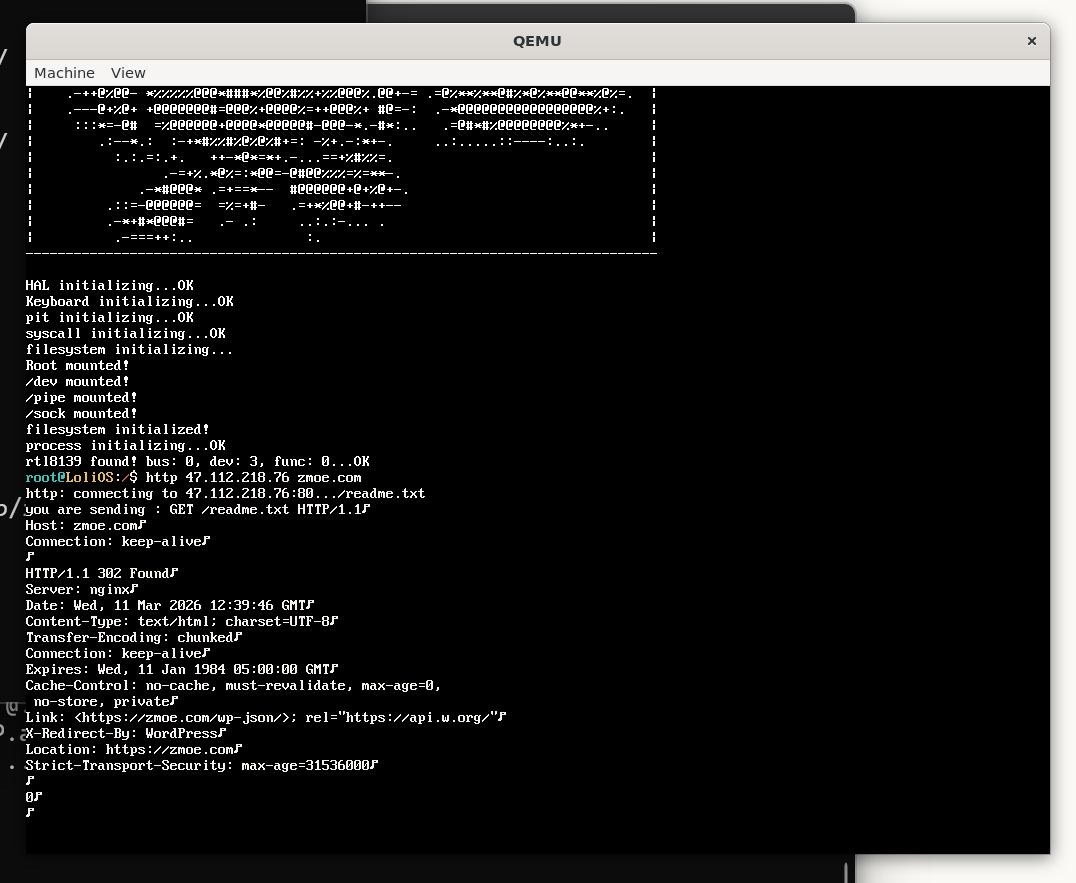
我们已经有一个能用的TCP网络栈了!
下一节我们来看看连接的关闭。
参与讨论
(Participate in the discussion)
参与讨论
没有发现评论
暂无评论