
自制操作系统(12):进程创建、调度与切换(下)
上一篇,我们在自制的操作系统中实现了一个初步的多进程实现,之所以说是初步实现,是因为现在多进程的调度器调度算法还不公平,而且调度时,不应该排除0号进程,而且我们能接受的入口点函数不应该排除带入参的情况。
分离shell
我们先做点简单的事,把shell从我们的0号进程分离开,作为1号进程,其实就是提取成一个函数,再在kernel_main用create_process去启动。
extern "C" void kernel_main(multiboot_info_t* mbi) {
pmm_prepare(mbi);
...
printf("Welcome, aoverb!\n\n");
printf("The kernel_main lies in %X, sounds great!\n\n", &kernel_main);
create_process(reinterpret_cast<void*>(&shell));
while (1) {
yield();
}
}
我们让0号进程一直让出。
更公平的调度算法-MLFQ
现在的调度算法太简单了,首先,它依赖进程的主动让出,如果进程一直不让出,就会让其它进程“饿死”;其次它优先执行序号靠前的进程,而这没有任何道理。
void yield() {
for (uint8_t i = 1; i < MAX_PROCESSES_NUM; ++i) {
if (i == cur_process_id) continue;
if (process_list[i]) {
process_switch_to(i);
return;
}
}
// 实在没有能切换的进程了,就切回到0号进程
process_switch_to(0);
return;
}
我们给它升级成MLFQ算法,这是一个有多个队列,每个队列代表一个优先级的调度算法,该调度算法每一段时间强制执行一次重调度,优先执行优先级最高的队列的进程。所有进程被创建时都会被放在最高的队列,当它们在当前队列赋予的时间配额用光时,就会被移到优先级较次的队列并重新赋予配额。最后,每隔一段时间,所有进程会被移动到优先级最高的队列。
这个算法有很多好处,不会有饿死问题,更快的响应时间…等等。关于这个算法的详细介绍,可阅读OSTEP。
数据结构
constexpr uint8_t NUM_PRIORITY = 5;
constexpr uint8_t MAX_PRIORITY = NUM_PRIORITY - 1;
constexpr uint8_t MAP_PRIORITY_TO_QUOTA[NUM_PRIORITY] = {32, 16, 8, 4, 2};
PCB* sche_queue_head[NUM_PRIORITY];
constexpr uint16_t RESETCNT_INITIAL = 500;
uint16_t resetcnt = RESETCNT_INITIAL;
我这里把优先级队列分为5个,数字和索引越大优先级越高,对应的初始时间片为{32, 16, 8, 4, 2}(Claude告诉我这样最好),重置优先级的tick数是500(也是Claude告诉我这样最好)。
队列的实现形式是环形链表,这样做有很多好处,最大的好处是我既不用手搓队列,也不需要多记录一个尾指针,合并两个链表的操作也很方便。
同样的,我们需要在PCB里面多记录一些调度相关的信息,如优先级、剩余时间配额、前驱后继指针…
typedef struct PCB {
...
uint16_t priority;
uint16_t quota;
PCB* prev;
PCB* next;
} PCB;
插入和移除逻辑
void insert_into_scheduling_queue(uint8_t pid);
void remove_from_scheduling_queue(uint8_t pid);
两个接口的实现逻辑我不打算在这里赘述,但我的设计意图是让这两个接口尽量简单,实现尽量高效(O(1)!),多亏了环形链表,高效的实现并不复杂。
调度逻辑
void schedule() {
PCB* cur_pcb = process_list[cur_process_id];
if (--(cur_pcb->quota) == 0) {
if (cur_pcb->priority > 0) {
remove_from_scheduling_queue(cur_process_id);
insert_into_queue(cur_pcb, cur_pcb->priority - 1);
}
cur_pcb->quota = MAP_PRIORITY_TO_QUOTA[cur_pcb->priority];
}
if (--resetcnt == 0) {
resetcnt = RESETCNT_INITIAL;
move_all_to_top_priority();
}
PCB* chosen_process = nullptr;
for (int i = NUM_PRIORITY - 1; i >= 0; --i) {
if (sche_queue_head[i]) {
chosen_process = sche_queue_head[i];
sche_queue_head[i] = sche_queue_head[i]->next;
break;
}
}
if (!chosen_process) {
chosen_process = process_list[0];
}
process_switch_to(chosen_process->pid);
}
我们可以在定时中断的地方去触发这个schedule来触发调度逻辑。上面干的事情很简单,减少当前进程的时间配额,如果配额为0就降低优先级,如果已经是最低优先级了就直接重置配额即可(也只能这么做了),后面的选择进程切换的逻辑会保证不让同一优先级的别的进程饿死;还有就是如果经过了一段比较长的时间(这里是500个tick,也就是5秒),就把所有的进程移到最高的优先级。
切换进程时,选一个优先级尽可能高的有进程存在的队列切换,并在切换前把链表的头指针往后继走一位。
重置优先级的逻辑
void move_all_to_top_priority() {
for (int i = 1; i < NUM_PRIORITY; ++i) {
if (!sche_queue_head[i - 1]) continue;
if (sche_queue_head[i]) {
sche_queue_head[i]->prev->next = sche_queue_head[i - 1]->next;
sche_queue_head[i - 1]->next->prev = sche_queue_head[i]->prev;
sche_queue_head[i]->prev = sche_queue_head[i - 1];
sche_queue_head[i - 1]->next = sche_queue_head[i];
} else {
sche_queue_head[i] = sche_queue_head[i - 1];
}
sche_queue_head[i - 1] = nullptr;
}
PCB* head = sche_queue_head[MAX_PRIORITY];
PCB* tail = head;
do {
tail->priority = MAX_PRIORITY;
tail->quota = MAP_PRIORITY_TO_QUOTA[MAX_PRIORITY];
tail = tail->next;
} while (tail != head);
}
从优先级低的队列开始向上合并,最后重新设置该队列所有进程的优先级和配额。重新设置优先级和配额这里是O(n),比较低效,但考虑到重置逻辑的执行频率,也许并不是什么要紧的瓶颈。
一些坑
在调试调度器的过程,我发现进程并没有交替执行(而且出来的进程号也很奇怪…不过这是别的问题了)。一开始我以为是时间片太少了,或者每个进程执行的任务不够多,发现并不是这个问题。
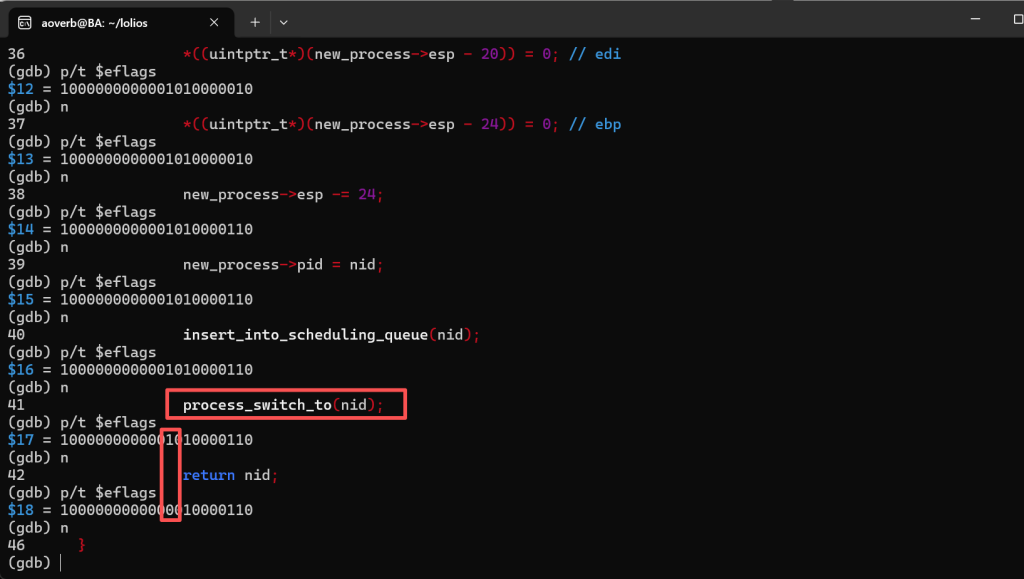
后面通过gdb调试发现,居然是中断被关了,进一步排查,是在process_switch_to之后被关了。
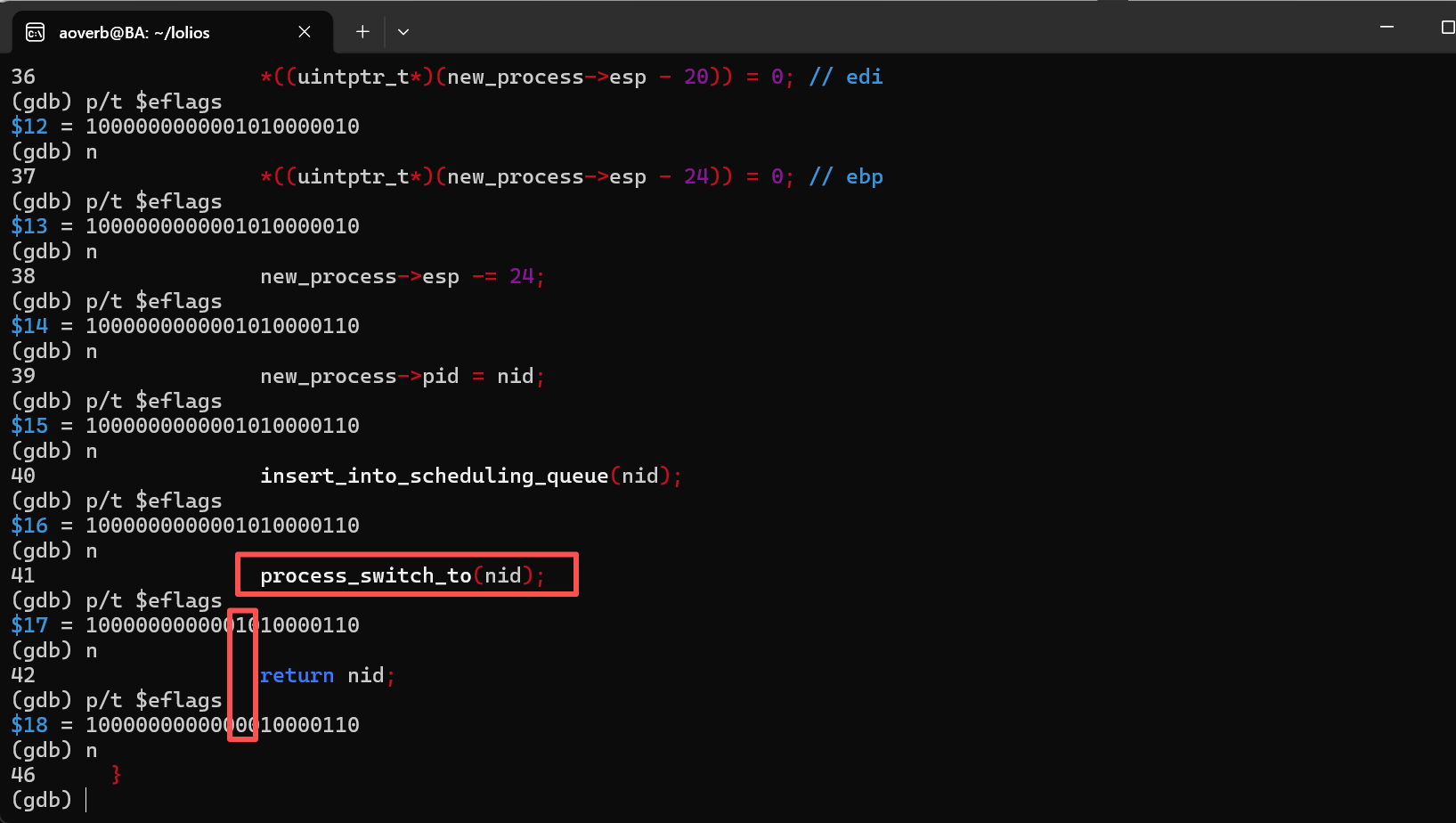
这就要说回我们上一篇的process_switch_to了…我发现我们居然没有保存eflag,而且创建新进程时也没有打开中断,所以需要去修复这两处Bug。
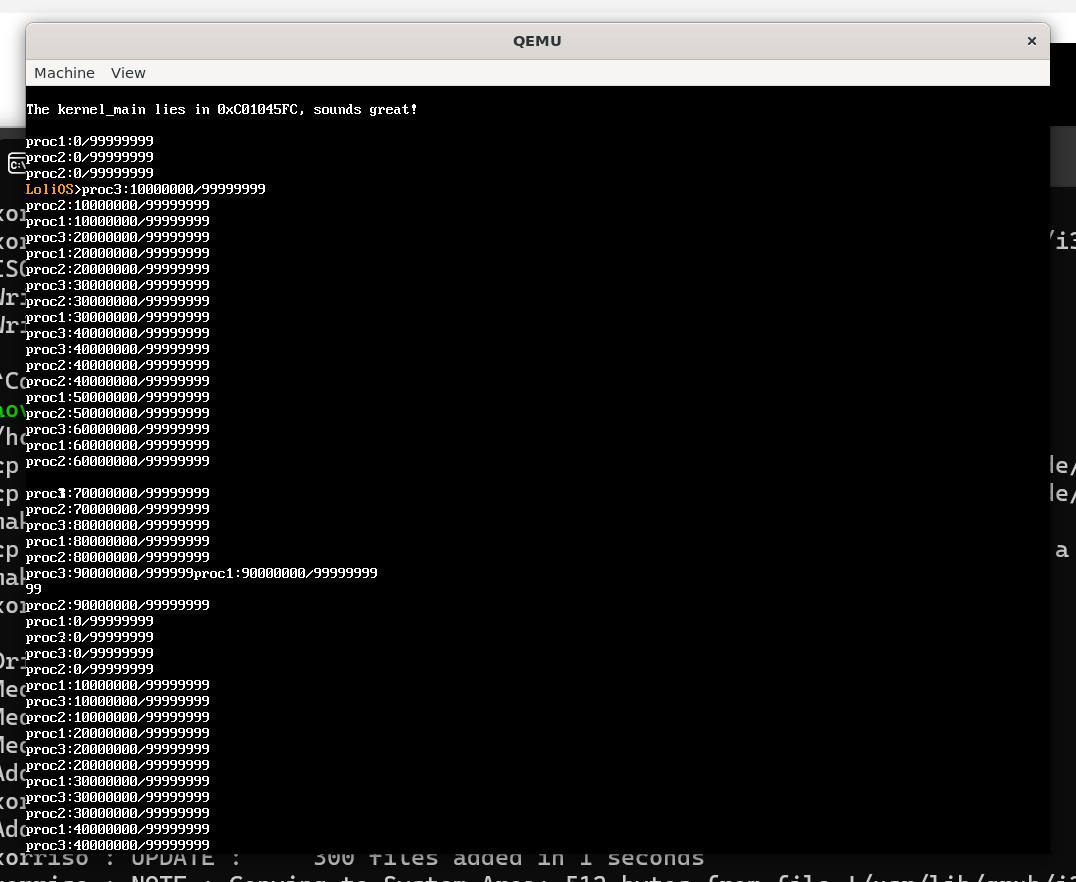
修复之后我们的多进程逻辑就能愉快地跑起来了。Yes!
但是你其实可以注意到,上面控制台的输出有异常,这是因为我们没有给控制台输出加锁所造成的。(说到底,我们还没有实现锁呢!)这个需要后面再修复。
创建具有入参的进程
把返回地址放在栈顶,把入参放在返回地址的后面,这个是cdecl规定的,因此,我们再在create_process时多传入一个指向所有入参的地址,构造栈帧时放在返回地址的后面即可:
uint32_t create_process(void* entry, void* args) {
for (auto nid = 0; nid < MAX_PROCESSES_NUM; ++nid) {
if (process_list[nid] == nullptr) {
...
*((uintptr_t*)(new_process->esp - 4)) = reinterpret_cast<uintptr_t>(args);
*((uintptr_t*)(new_process->esp - 8)) = reinterpret_cast<uintptr_t>(&exit_process_wrapper);
接下来,我们就可以像这样传递入参:
const char* c1 = "test1";
const char* c2 = "test2";
const char* c3 = "test3";
create_process(reinterpret_cast<void*>(&proc1), (void*)c1);
create_process(reinterpret_cast<void*>(&proc1), (void*)c2);
create_process(reinterpret_cast<void*>(&proc1), (void*)c3);
create_process(reinterpret_cast<void*>(&shell), nullptr);
没有入参的情况,我们直接传一个空指针即可。
我们主进程的函数会收到这个入参,我们按实际情况作相应转换即可。
void proc1(void* args) {
char* s = reinterpret_cast<char*>(args);
for (uint32_t i = 0; i < 99999999; i++) {
if (i % 10000000 == 0) printf("%s %d:%d/99999999\n", s, cur_process_id, i);
}
}
这样我们就能在创建进程的时候传递入参了。
进程状态
目前来说,我们的进程只有两种状态(隐式):正在运行和就绪,考虑到更好地对我们的进程进行管理,以及优化整体的调度策略,我们有必要引入进程状态,也就是给我们的PCB增加一个state字段,来表示当前进程正在处于什么状态。目前来说,我们需要四种状态,就绪,运行中,阻塞中和终止中。
enum class process_state {
READY = 0, // 进程正在等待被调度
RUNNING = 1, // 进程正在运行
BLOCKED = 2, // 进程正在等待某种事件的发生
ZOMBIE = 3 // 进程已经终结,等待资源被回收
};
typedef struct PCB {
uint8_t pid;
uintptr_t esp;
// 该任务的内核栈底(用于释放内存)
void* kernel_stack_bottom;
uint16_t priority;
uint16_t quota;
uint32_t create_time;
process_state state;
PCB* prev;
PCB* next;
} PCB;
下面我们来针对各个状态来讨论适配代码:
就绪与运行态
当一个进程被创建时,它就会被设置为就绪状态,并加入调度队列;
当一个进程被调度时,它会把当前正在运行的进程设置为就绪状态,将其重新加入调度序列,而该进程自身就会被移出调度队列,并被设置为运行状态。
也就是说,按照我们之前的设计,我们是把所有的进程都会放在调度队列里,被调度后进程又被重新放回队列后面,现在不一样了,我们的队列里面,只会存放就绪状态的进程。
抽离进程队列逻辑
既然我们预料到后面会有各种的队列,我们最好把队列这个概念从调度队列中抽离出来,成为一个进程队列。
bool insert_into_process_queue(process_queue& queue, PCB* process) {
if (process == nullptr || process->prev != nullptr || process->next != nullptr) {
// 重复插入直接忽略
return false;
}
if (queue) {
process->next = queue;
process->prev = queue->prev;
queue->prev->next = process;
queue->prev = process;
} else {
process->next = process;
process->prev = process;
queue = process;
}
return true;
}
void remove_from_process_queue(process_queue& queue, uint8_t pid) {
// 不打算在这里检查pid对应的PCB是否在传入的queue中,调用者应该做检查
PCB* cur_pcb = process_list[pid];
PCB* prev_pcb = cur_pcb->prev;
PCB* next_pcb = cur_pcb->next;
if (cur_pcb == prev_pcb) {
queue = nullptr;
cur_pcb->prev = cur_pcb->next = nullptr;
return;
}
if (prev_pcb) prev_pcb->next = next_pcb;
if (next_pcb) next_pcb->prev = prev_pcb;
if (queue == cur_pcb) {
queue = cur_pcb->next;
}
cur_pcb->prev = cur_pcb->next = nullptr;
}
以后我们会有各种的进程队列,因此尽早抽离会更好。
阻塞状态
阻塞状态的进程是在等待某种事件(比如说,互斥锁,休眠结束事件等)。
按照上面的逻辑,正在运行的进程不处于任何队列,于是我们可以很方便地把当前进程的状态设置为阻塞态,然后把自身放入一个特定事件的等待队列里,并让出CPU。
当特定事件发生时,代表我们等待的某些原本阻塞的情况已经被满足,也就意味着我们的程序已经就绪,这个时候,事件的处理函数会把我们重新设置为就绪态,并把我们放回调度序列。
终结待回收状态
我们之前终结进程的逻辑是这样的:
uint32_t exit_process(uint8_t pid) {
if (pid == 0 || process_list[pid] == nullptr) return 1;
remove_from_scheduling_queue(pid);
PCB*& cur_process = process_list[pid];
kfree(reinterpret_cast<void*>(cur_process->kernel_stack_bottom)); // 内核栈被释放!
kfree(reinterpret_cast<void*>(cur_process));
cur_process = nullptr;
yield();
// 不应该执行到这里
return 0;
}
可以看到上面的注释对应的代码之后,内核栈已经被释放了,理论上,我们不应该再调用任何函数,但是我们却这么做了,这是一个很严重的问题。有了进程状态后,我们就可以把当前的进程态设置为终结待回收状态,放入一个垃圾回收的等待序列,后面再去让特定的进程帮我们回收掉。我们让0号 idle进程去我们做回收。为什么?因为0号进程永远不会被结束,而且0号进程本来什么事都不会干,所以不会有任何干扰。
extern "C" void kernel_main(multiboot_info_t* mbi) {
...
create_process(reinterpret_cast<void*>(&shell), nullptr);
while (1) {
do_process_recycle();
yield();
}
}
修改后的进程退出逻辑和回收队列相关逻辑如下:
void free_pcb(PCB*& process) {
kfree(reinterpret_cast<void*>(process->kernel_stack_bottom));
kfree(reinterpret_cast<void*>(process));
process = nullptr;
}
uint32_t exit_process(uint8_t pid) {
if (pid == 0 || process_list[pid] == nullptr) return 1;
remove_from_scheduling_queue(pid);
PCB*& cur_process = process_list[pid];
if (pid != cur_process_id) {
free_pcb(cur_process);
return 0;
}
cur_process->state = process_state::ZOMBIE;
insert_into_process_recycle_queue(cur_process);
yield();
// 不应该执行到这里
return 0;
}
process_queue process_recycle_queue;
void insert_into_process_recycle_queue(PCB* process) {
insert_into_process_queue(process_recycle_queue, process);
}
void do_process_recycle() {
while (process_recycle_queue) {
uint8_t pid = process_recycle_queue->pid;
remove_from_process_queue(process_recycle_queue, process_recycle_queue->pid);
free_pcb(process_list[pid]);
}
}
锁
按理来说,我们今天的任务已经完成了,遗憾的是我们的控制台显示Bug还没有修复,因此,我觉得我们应该至少在这里先实现一个自旋锁来解决这个问题。
typedef struct spinlock {
volatile uint32_t locked = 0;
} spinlock;
void spinlock_acquire(spinlock* lock) {
while(1) {
uint32_t old = 1;
asm volatile ("xchgl %0, %1"
: "=r"(old), "+m"(lock->locked)
: "0"(old)
: "memory"
);
if (old == 0) break;
asm volatile("pause");
}
}
void spinlock_release(spinlock* lock) {
lock->locked = 0;
}
自旋锁的核心是xchgl这个原子的汇编指令,这个指令的作用是交换两个值。我们用这个值来同时获取并更新锁的值,就能保证同时只有一个进程能进入被锁的区域了。
最后我们在terminal_write加上这把自旋锁:
...
#include <kernel/spinlock.h>
...
spinlock tty_lock;
...
void terminal_write(const char* data, size_t size) {
spinlock_acquire(&tty_lock);
for (size_t i = 0; i < size; i++) {
...
}
spinlock_release(&tty_lock);
}
最后我们来看看效果。
好吧,每行输出的完整性还是被破坏了,但是至少,我们能输出完整的字符了,滚屏也没有问题了。
要保证每行输出的完整性,我们就得重新设计printf,把要输出的字符格式化到一个缓冲区,并调用一个新的,输出一整行字符的terminal_write。但是别沮丧,我们今天做的已经够多了。现在这个结果,已经挺令人满意的了。
总结
今天我们实现了一个更好的调度器——借助MLFQ,多级反馈队列,我们还把shell分离作为1号进程(后面我们还要把这个进程移到用户态),具备了创建具有入参进程的功能,还实现了自旋锁,并利用它来锁住我们的tty防止进程输出打架。相当不错的一天!
那么下一步,我们是时候!进入用户态了!在下一篇,我们将跳出ring 0,来到ring 3的世界!我们将创建第一个用户态进程!习惯了在内核态编程的我们,想必会在用户态的世界里面碰到不少钉子。无论如何,我们需要耐心,那么下篇再见吧。
参与讨论
(Participate in the discussion)
参与讨论
没有发现评论
暂无评论